AWing-Adaptive Wing Loss for Robust Face Alignment via Heatmap Regression
论文,pytorch版本源码 目前针对deep network的热图方式的研究很多,且精度比回归方式好,但很少有研究热图的损失函数。目前主流的热图损失函数都是均方误差(MSE),在本文中则根据Wing Loss的启发,提出了一种新的针对热图的损失函数—-Adaptive Wing Loss。为了解决前景像素和背景像素之间的不平衡问题,还提出了Weighted Loss Map。为了进一步提高人脸对齐精度,还引入了boundary prediction 和 CoordConv。
论文贡献
- 受Wing Loss[1]启发,提出针对热图的Adaptive Wing Loss;
- 为了解决前景像素和背景像素之间的不平衡问题,提出了Weighted Loss Map;
- 提出将边界boundary和CoordConv的训练方式。
整体结构
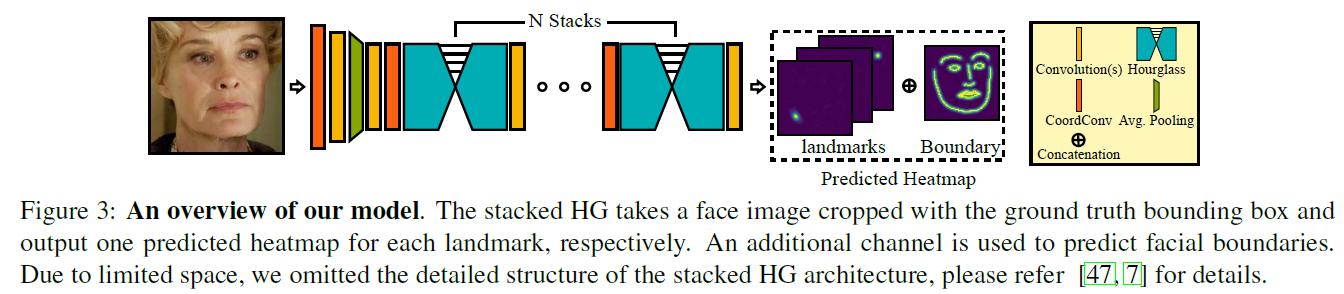
图1.模型整体结构示意图
本文针对的是损失函数和新的训练方式,没有模型结构的优化。结构为4 stacked HourGlass模型,输入图像256x256,输出为64x64。输入图像由GT bbox裁剪而得。
输出通多会附加一个,用来预测boundary。所以输出的热图包含C个landmark和1个boundary。
Adaptive Wing Loss
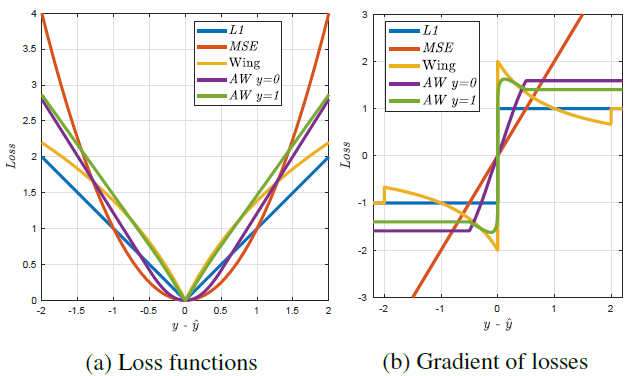
图2.不同loss对比
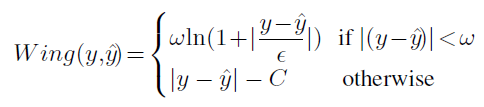

图3.Wing Loss与AWing Loss的不同
wing loss是人脸关键点回归方式的loss,预测值的范围为0-1。wing loss在error特别大时,梯度为常数,当error比较小时,梯度比L1和MSE都要大。因此在小的error时能够放大,从而得到更好的结果。
但是Wing Loss无法克服在$y-\widehat{y}=0$出梯度不连续的问题,导致相较于LI Loss,更难收敛。这个属性导致Wing loss不适合应用在heatmap regression方法上。因为热图有很多error极小的背景像素,不成比例。实验显示,在热图上使用Wing Loss从来没有正常收敛过。
因此我们提出了Adaptive Wing Loss。
有两个值得注意的点:
- 前景像素:训练时,一开始更加专注于减少这部分的error,然后随着误差接近于0,这部分的影响也迅速减小,不在关注这些“足够好”的像素。这样有助于训练的收敛、
- 背景像素:可以表现的像MSE一般,即随着训练误差的减少,地图逐渐减小至0。
以上两点,单一的loss并不能同时满足,因此loss能适应GT heatmap的不同像素强度,这就是Adaptive Wing Loss提出的思路。且值得注意的是,该公式为heatmap的值为0-1的情况。
Weighted loss map
在热图上,前景像素站的比例极少,仅有1.2%,因此假如每个像素的weight一样,就会出现不平衡,导致训练收敛缓慢和性能不佳。
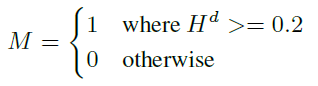

图4.Weighted loss map
Boundary 和 CoordConv
添加Boundary prediction作为未来的一个子任务。
进一步提高精度。
参考文献
[1] Zhen-Hua Feng, Josef Kittler, Muhammad Awais, Patrik Huber, and Xiao-Jun Wu. Wing loss for robust facial landmark localisation with convolutional neural networks. In The IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2018

感谢您的支持,我会继续努力的!


打开微信扫一扫,即可进行扫码打赏哦